




在現代工業制造中,焊接機器人憑借高效、精準、穩定的優勢,成為汽車、鋼結構、管道工程等領域焊接時的關鍵裝備。其中主力軍之一的激光焊接機器人卻并非單一設備,而是由激光發生器、機械執行機構、控制系統、檢測系統等多模塊協同運作的復雜體系。下面為大家簡單介紹一下激光焊接機器人的工作過程。

一、激光加熱。
激光焊接機器人利用激光束作為焊接熱源。一般采用半導體激光器提供高能量的激光束。

二、參數調整。
通過控制系統對電流輸出功率等工藝參數進行設定。
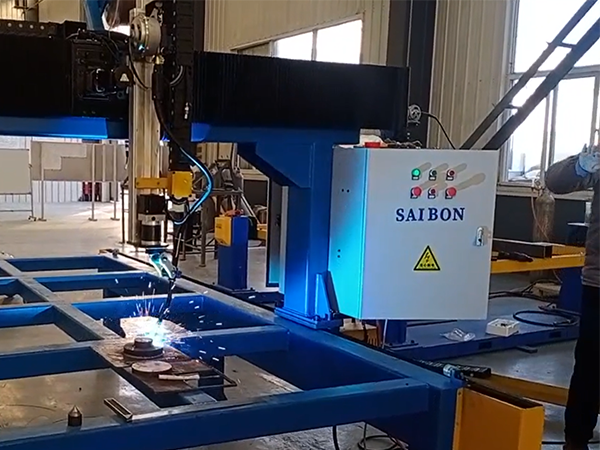
三、位置確認及焊接。
隨后,激光焊接機器人的機械臂配合減速器控制運動角度與速度,根據預設的焊接路徑,進行焊接。也可以根據焊接工件外型、尺寸等的不同,聯動賽邦出品的各式變位機同時進行焊接工作。
四、實時檢測與閉環控制。
此外,實時檢測與閉環控制是保障焊接質量的重要環節。激光焊接機器人通常搭載視覺檢測系統與傳感器:高速相機拍攝熔池圖像,通過圖像算法分析熔池大小、形狀,判斷是否存在咬邊、未熔合等缺陷。紅外傳感器實時監測熔池溫度,避免溫度過高導致工件變形。力傳感器則感知機械臂與工件的接觸力,防止碰撞損傷。一旦檢測到異常(如熔池溫度過高、焊絲送進受阻),檢測系統立即將信號反饋至控制系統,系統迅速調整參數 —— 例如降低激光功率、暫停送絲,或調整機械臂位置,直至恢復正常狀態,形成 “檢測 - 反饋 - 調整” 的閉環,確保每一段焊縫都符合質量標準。
綜上,激光焊接機器人的工作過程是多系統協同的精密過程,每個環節環環相扣。正是這種 “能量可控、運動精準、質量可監” 的運作機制,使其能夠適應不同工業場景的焊接需求,實現高效、高質量的自動化焊接,成為現代制造業升級的重要支撐。


